

Posted also on:
https://www.instructables.com/id/Bone-Dragon-Moonlight-Clock/
Entered in contest: https://www.instructables.com/contest/clocks2020/
Some time ago I built a clock for my living room, since I found nothing to buy which had at least tolerable designs 🙂
Of course my son seeing this had a request of his own. So to summarize, he said he wants:
- a radio controlled clock
- with a dragon on it
- on top of a moon
- which has a night light which starts automatically at night
- using black light for some extra style
Supplies:
- a radio controlled clock module (this one)
- round acrylic glass
- wodden base
- wire for the structure
- dry braches
etc. to be specified in the next steps
OK, so I started with the electronics. In this part I wanted to do the following:
- night light using some 5050 led strips
- black light using 5050 uv light led strips (396 nm light)
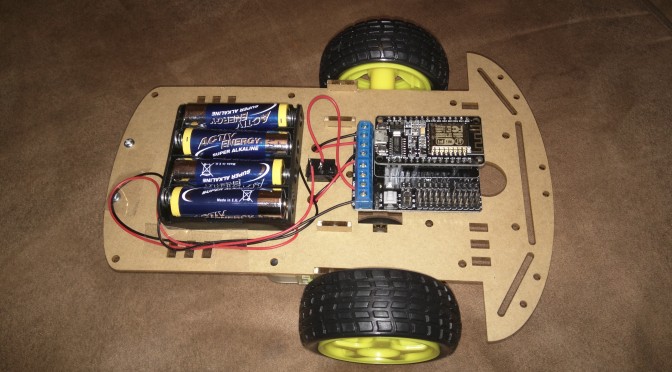
- make it all with solar charged batteries using this ripped up diy kit
- charge by day and go on automatically by night
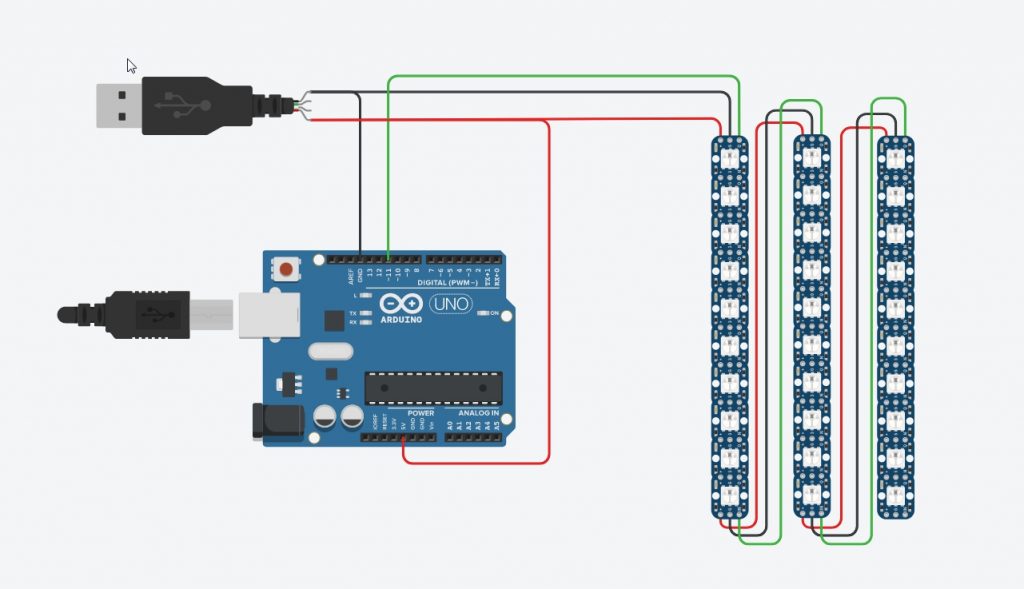
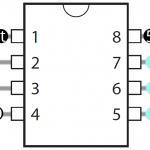
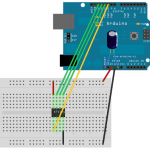
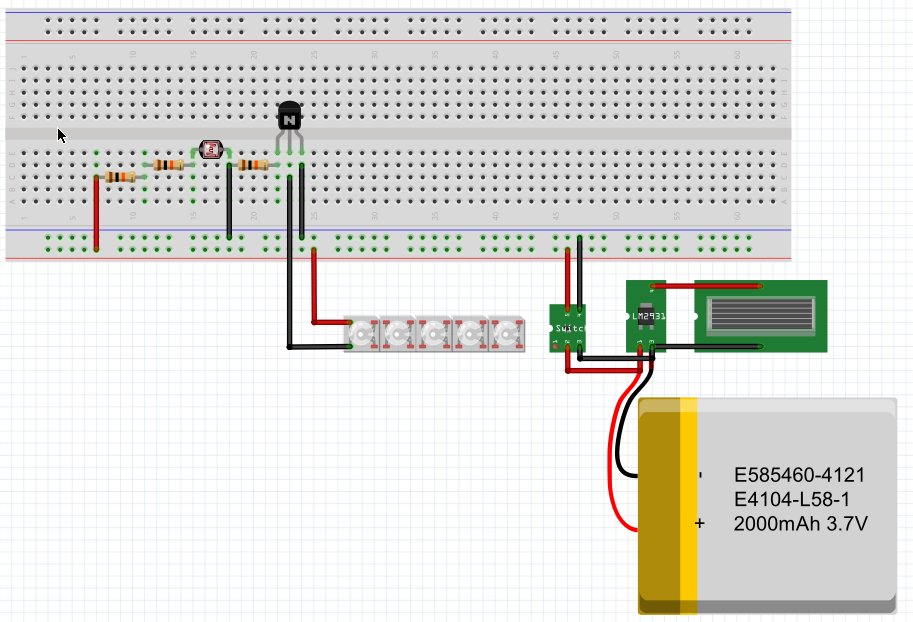
So I started putting all together like shown in the fritzing sketch: 3x 10kO resistors, a simple photoresistor and a TIP120 transistor. All connected with the 12V leds and the 3.7V battery/solar charging module (also used a 3.7V to 12V voltage step-up converter)
I went on to build the actual clock. I started painting the back side of the acrylic glass with:
Amsterdam Specialities – black light reflective paints
Started with yellow, and went on with some orange/red to give it a moon-like structure paint. While painting it I used a black light flash light to check the effect.
After that I fixed the clock module in the center of the glass.
OK, for the eyes you need to take the time since they have to be nice.
First I printed something from the internet, in the style I wanted. Then I cut out the form from the bottom of a plastic bottle. Then I painted them on the inside starting with black, then yellow, then the red base.
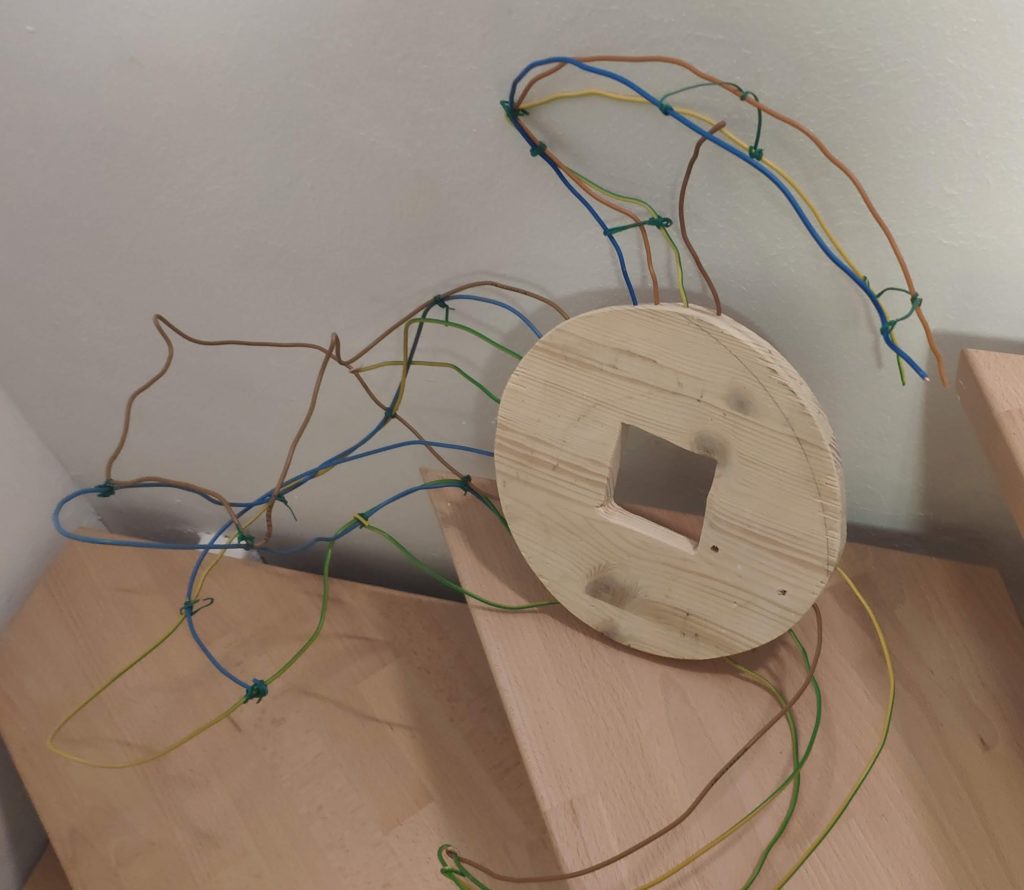
Then I cut out a wooden circle and inside a rectangle to fit the clockwork.
Then using a lot of wire I started to form the base of the dragon, which later on had to hold the branches and twigs. It consists of 3 parts: the head, the wings and the tail.
I had to watch the form having in mind that the mouth should be lit, the eyes need a plain spot, the wings need to cover the black light led strips and hold the solar charging module.
Now every part of the dragons I planned to do with twigs, but the inside of the mouth and the wings had to look more real so I used some papermache, which will be painted red in the next step.
The teeth (also twig parts) I fixed first with hot glue, and covered with papermache.
For this next step I almost melted my hot glue gun 🙂
I started covering all the base of the dragon with cut twigs, following its form and body parts. It took some time but it is really fun to see how he grows 🙂
Also used some twigs on the wings to give everywhere the impression this dragon consists only of bones … hence “Bone Dragon”
For some finishing touch we made it all shiny with a clear coat spray. I sprayed some more on the inside of the mouth.
At the end I put on the electronics and glued all parts in place:
- the photoresistor is on its tail
- the solar panel on the wings
- the black light led strip is under the wings
- 3 small light strips (3 leds each) are under the eyes and in the mouth
So when lit, the paints on the moon start to reflect the light looking like glowing.
Hope you had fun, we sure did 🙂